![]()
![]()
...and follow me on Twitter: @eriknordeus
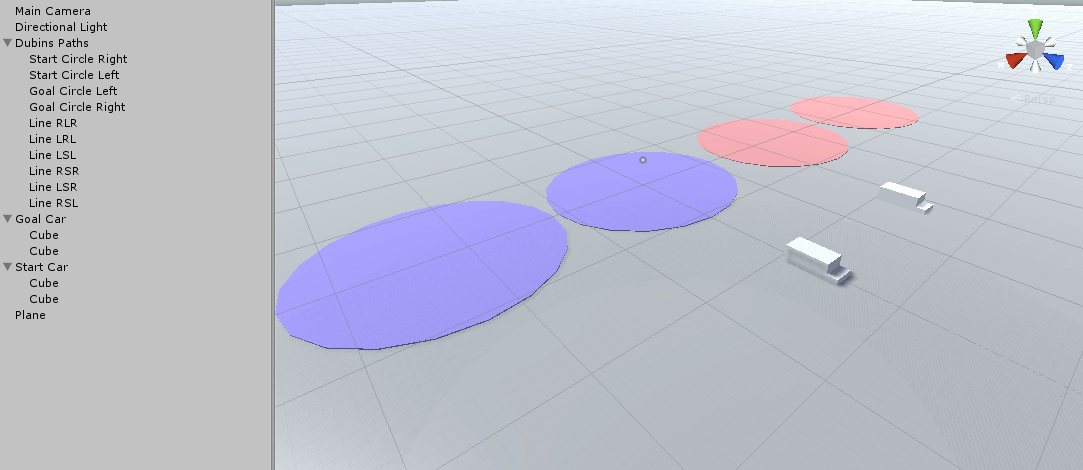
First of all we need a basic scene, so add a large plane that will act as ground. You then need to build a car consisting of 2 boxes (so we can tell which part of the car is the front to make it easier to debug). The car's size should be something like 2 m * 5 m, like a real car. Also don't forget to remove all colliders of everything we add in this part (except the ground). Duplicate the car because we need two cars (one real car and one car that the real car will travel towards).
Then add 4 circles with the same radius as the turning radius (R in the previous section) you want. My turning radius is 11 m so my circles have the x- and z-scale 22. Also add an empty gameobject called "Dubins Paths". Parent the circles to this gameobject to get a cleaner workspace. Then add 6 gameobject with line renderers attached to them. These line renderers will display our final Dubins paths.
Everything should now look like this:
We will be able to move and rotate the target car (the car we want to reach) with the mouse and some keys. So add this script to the "Goal car."
using UnityEngine;
using System.Collections;
namespace DubinsPathsTutorial
{
//Move and rotate the car we want to reach with a Dubins Path
//Attach the script to the target car
public class MoveRotateCar : MonoBehaviour
{
//The scene's camera
public Camera cameraObj;
void Update()
{
//Move the target car with the mouse
MoveCar();
//Rotate the target car around y
RotateCar();
}
//Move the car with the mouse
void MoveCar()
{
//Fire a ray from the mouse position
Ray ray = cameraObj.ScreenPointToRay(Input.mousePosition);
RaycastHit hit;
if (Physics.Raycast(ray, out hit))
{
//Where the the ray hot the ground?
Vector3 hitCoordinate = hit.point;
hitCoordinate.y = 0f;
//Move the car to that position
transform.position = hitCoordinate;
}
}
//Rotate the car around its axis
void RotateCar()
{
float rotationSpeed = 80f;
//Rotate counter clock-wise
if (Input.GetKey(KeyCode.Q))
{
transform.Rotate(-Vector3.up * Time.deltaTime * rotationSpeed);
}
else if (Input.GetKey(KeyCode.E))
{
transform.Rotate(Vector3.up * Time.deltaTime * rotationSpeed);
}
}
}
}
The script is the main script that will control everything else and is the only script you have to attach to the gameobject "Dubins Paths".
using UnityEngine;
using System.Collections;
using System.Collections.Generic;
namespace DubinsPathsTutorial
{
//Display the final Dubins Paths
public class DubinsDebug : MonoBehaviour
{
//Everything we need to add in the editor
//Circles
public Transform goalCircleLeft;
public Transform goalCircleRight;
public Transform startCircleLeft;
public Transform startCircleRight;
//Line renderers
public LineRenderer lineRSR;
public LineRenderer lineLSL;
public LineRenderer lineRSL;
public LineRenderer lineLSR;
public LineRenderer lineRLR;
public LineRenderer lineLRL;
//The cars we generate paths to/from
public Transform startCar;
public Transform goalCar;
//Objects
DubinsGeneratePaths dubinsPathGenerator;
void Start()
{
dubinsPathGenerator = new DubinsGeneratePaths();
}
void Update()
{
//To generate paths we need the position and rotation (heading) of the cars
Vector3 startPos = startCar.position;
Vector3 goalPos = goalCar.position;
//Heading is in radians
float startHeading = startCar.eulerAngles.y * Mathf.Deg2Rad;
float goalHeading = goalCar.eulerAngles.y * Mathf.Deg2Rad;
//Get all valid Dubins paths
List<OneDubinsPath> pathDataList = dubinsPathGenerator.GetAllDubinsPaths(
startPos,
startHeading,
goalPos,
goalHeading);
//If we have paths
if (pathDataList.Count > 0)
{
//Display all paths with line renderers
DebugAllPaths(pathDataList);
}
//Position the left and right circles
PositionLeftRightCircle();
}
//Position the left and right circle objects for debugging
void PositionLeftRightCircle()
{
goalCircleLeft.position = dubinsPathGenerator.goalLeftCircle;
goalCircleRight.position = dubinsPathGenerator.goalRightCircle;
startCircleLeft.position = dubinsPathGenerator.startLeftCircle;
startCircleRight.position = dubinsPathGenerator.startRightCircle;
}
//Displaying all Dubins paths with line renderers for debugging
void DebugAllPaths(List<OneDubinsPath> pathDataList)
{
//Deactivate all line renderers (we activate them if a path is available)
DeactivateLineRenderers();
for (int i = 0; i < pathDataList.Count; i++)
{
PathType currentPathType = pathDataList[i].pathType;
switch (currentPathType)
{
case PathType.LRL:
DisplayPath(pathDataList[i], lineLRL);
break;
case PathType.RLR:
DisplayPath(pathDataList[i], lineRLR);
break;
case PathType.LSR:
DisplayPath(pathDataList[i], lineLSR);
break;
case PathType.RSL:
DisplayPath(pathDataList[i], lineRSL);
break;
case PathType.RSR:
DisplayPath(pathDataList[i], lineRSR);
break;
case PathType.LSL:
DisplayPath(pathDataList[i], lineLSL);
break;
}
}
}
//Display a path with a line renderer
void DisplayPath(OneDubinsPath pathData, LineRenderer lineRenderer)
{
//Activate the line renderer
lineRenderer.gameObject.SetActive(true);
//The coordinates of the path
List pathCoordinates = pathData.pathCoordinates;
//Display the final line
lineRenderer.SetVertexCount(pathCoordinates.Count);
for (int i = 0; i < pathCoordinates.Count; i++)
{
lineRenderer.SetPosition(i, pathCoordinates[i]);
}
}
//Deactivate all line renderers in case a circle is not possible
//Then we dont want to show the old circle
void DeactivateLineRenderers()
{
lineLRL.gameObject.SetActive(false);
lineRLR.gameObject.SetActive(false);
lineLSL.gameObject.SetActive(false);
lineRSR.gameObject.SetActive(false);
lineLSR.gameObject.SetActive(false);
lineRSL.gameObject.SetActive(false);
}
}
}
This script will generate the Dubins paths and sort them.
using UnityEngine;
using System.Collections;
using System.Collections.Generic;
namespace DubinsPathsTutorial
{
//Generates Dubins paths
public class DubinsGeneratePaths
{
//The 4 different circles we have that sits to the left/right of the start/goal
//Public so we can position the circle objects for debugging
public Vector3 startLeftCircle;
public Vector3 startRightCircle;
public Vector3 goalLeftCircle;
public Vector3 goalRightCircle;
//To generate paths we need the position and rotation (heading) of the cars
Vector3 startPos;
Vector3 goalPos;
//Heading is in radians
float startHeading;
float goalHeading;
//Where we store all path data so we can sort and find the shortest path
List<OneDubinsPath> pathDataList = new List<OneDubinsPath>();
//Get all valid Dubins paths sorted from shortest to longest
public List<OneDubinsPath> GetAllDubinsPaths(Vector3 startPos, float startHeading, Vector3 goalPos, float goalHeading)
{
this.startPos = startPos;
this.goalPos = goalPos;
this.startHeading = startHeading;
this.goalHeading = goalHeading;
//Reset the list with all Dubins paths
pathDataList.Clear();
//Position the circles that are to the left/right of the cars
PositionLeftRightCircles();
//Find the length of each path with tangent coordinates
CalculateDubinsPathsLengths();
//If we have paths
if (pathDataList.Count > 0)
{
//Sort the list with paths so the shortest path is first
pathDataList.Sort((x, y) => x.totalLength.CompareTo(y.totalLength));
//Generate the final coordinates of the path from tangent points and segment lengths
GeneratePathCoordinates();
return pathDataList;
}
//No paths could be found
return null;
}
//Position the left and right circles that are to the left/right of the target and the car
void PositionLeftRightCircles()
{
//Goal pos
goalRightCircle = DubinsMath.GetRightCircleCenterPos(goalPos, goalHeading);
goalLeftCircle = DubinsMath.GetLeftCircleCenterPos(goalPos, goalHeading);
//Start pos
startRightCircle = DubinsMath.GetRightCircleCenterPos(startPos, startHeading);
startLeftCircle = DubinsMath.GetLeftCircleCenterPos(startPos, startHeading);
}
//
//Calculate the path lengths of all Dubins paths by using tangent points
//
void CalculateDubinsPathsLengths()
{
//RSR and LSL is only working if the circles don't have the same position
//RSR
if (startRightCircle.x != goalRightCircle.x && startRightCircle.z != goalRightCircle.z)
{
Get_RSR_Length();
}
//LSL
if (startLeftCircle.x != goalLeftCircle.x && startLeftCircle.z != goalLeftCircle.z)
{
Get_LSL_Length();
}
//RSL and LSR is only working of the circles don't intersect
float comparisonSqr = DubinsMath.turningRadius * 2f * DubinsMath.turningRadius * 2f;
//RSL
if ((startRightCircle - goalLeftCircle).sqrMagnitude > comparisonSqr)
{
Get_RSL_Length();
}
//LSR
if ((startLeftCircle - goalRightCircle).sqrMagnitude > comparisonSqr)
{
Get_LSR_Length();
}
//With the LRL and RLR paths, the distance between the circles have to be less than 4 * r
comparisonSqr = 4f * DubinsMath.turningRadius * 4f * DubinsMath.turningRadius;
//RLR
if ((startRightCircle - goalRightCircle).sqrMagnitude < comparisonSqr)
{
Get_RLR_Length();
}
//LRL
if ((startLeftCircle - goalLeftCircle).sqrMagnitude < comparisonSqr)
{
Get_LRL_Length();
}
}
//RSR
void Get_RSR_Length()
{
//Find both tangent positons
Vector3 startTangent = Vector3.zero;
Vector3 goalTangent = Vector3.zero;
DubinsMath.LSLorRSR(startRightCircle, goalRightCircle, false, out startTangent, out goalTangent);
//Calculate lengths
float length1 = DubinsMath.GetArcLength(startRightCircle, startPos, startTangent, false);
float length2 = (startTangent - goalTangent).magnitude;
float length3 = DubinsMath.GetArcLength(goalRightCircle, goalTangent, goalPos, false);
//Save the data
OneDubinsPath pathData = new OneDubinsPath(length1, length2, length3, startTangent, goalTangent, PathType.RSR);
//We also need this data to simplify when generating the final path
pathData.segment2Turning = false;
//RSR
pathData.SetIfTurningRight(true, false, true);
//Add the path to the collection of all paths
pathDataList.Add(pathData);
}
//LSL
void Get_LSL_Length()
{
//Find both tangent positions
Vector3 startTangent = Vector3.zero;
Vector3 goalTangent = Vector3.zero;
DubinsMath.LSLorRSR(startLeftCircle, goalLeftCircle, true, out startTangent, out goalTangent);
//Calculate lengths
float length1 = DubinsMath.GetArcLength(startLeftCircle, startPos, startTangent, true);
float length2 = (startTangent - goalTangent).magnitude;
float length3 = DubinsMath.GetArcLength(goalLeftCircle, goalTangent, goalPos, true);
//Save the data
OneDubinsPath pathData = new OneDubinsPath(length1, length2, length3, startTangent, goalTangent, PathType.LSL);
//We also need this data to simplify when generating the final path
pathData.segment2Turning = false;
//LSL
pathData.SetIfTurningRight(false, false, false);
//Add the path to the collection of all paths
pathDataList.Add(pathData);
}
//RSL
void Get_RSL_Length()
{
//Find both tangent positions
Vector3 startTangent = Vector3.zero;
Vector3 goalTangent = Vector3.zero;
DubinsMath.RSLorLSR(startRightCircle, goalLeftCircle, false, out startTangent, out goalTangent);
//Calculate lengths
float length1 = DubinsMath.GetArcLength(startRightCircle, startPos, startTangent, false);
float length2 = (startTangent - goalTangent).magnitude;
float length3 = DubinsMath.GetArcLength(goalLeftCircle, goalTangent, goalPos, true);
//Save the data
OneDubinsPath pathData = new OneDubinsPath(length1, length2, length3, startTangent, goalTangent, PathType.RSL);
//We also need this data to simplify when generating the final path
pathData.segment2Turning = false;
//RSL
pathData.SetIfTurningRight(true, false, false);
//Add the path to the collection of all paths
pathDataList.Add(pathData);
}
//LSR
void Get_LSR_Length()
{
//Find both tangent positions
Vector3 startTangent = Vector3.zero;
Vector3 goalTangent = Vector3.zero;
DubinsMath.RSLorLSR(startLeftCircle, goalRightCircle, true, out startTangent, out goalTangent);
//Calculate lengths
float length1 = DubinsMath.GetArcLength(startLeftCircle, startPos, startTangent, true);
float length2 = (startTangent - goalTangent).magnitude;
float length3 = DubinsMath.GetArcLength(goalRightCircle, goalTangent, goalPos, false);
//Save the data
OneDubinsPath pathData = new OneDubinsPath(length1, length2, length3, startTangent, goalTangent, PathType.LSR);
//We also need this data to simplify when generating the final path
pathData.segment2Turning = false;
//LSR
pathData.SetIfTurningRight(false, false, true);
//Add the path to the collection of all paths
pathDataList.Add(pathData);
}
//RLR
void Get_RLR_Length()
{
//Find both tangent positions and the position of the 3rd circle
Vector3 startTangent = Vector3.zero;
Vector3 goalTangent = Vector3.zero;
//Center of the 3rd circle
Vector3 middleCircle = Vector3.zero;
DubinsMath.GetRLRorLRLTangents(
startRightCircle,
goalRightCircle,
false,
out startTangent,
out goalTangent,
out middleCircle);
//Calculate lengths
float length1 = DubinsMath.GetArcLength(startRightCircle, startPos, startTangent, false);
float length2 = DubinsMath.GetArcLength(middleCircle, startTangent, goalTangent, true);
float length3 = DubinsMath.GetArcLength(goalRightCircle, goalTangent, goalPos, false);
//Save the data
OneDubinsPath pathData = new OneDubinsPath(length1, length2, length3, startTangent, goalTangent, PathType.RLR);
//We also need this data to simplify when generating the final path
pathData.segment2Turning = true;
//RLR
pathData.SetIfTurningRight(true, false, true);
//Add the path to the collection of all paths
pathDataList.Add(pathData);
}
//LRL
void Get_LRL_Length()
{
//Find both tangent positions and the position of the 3rd circle
Vector3 startTangent = Vector3.zero;
Vector3 goalTangent = Vector3.zero;
//Center of the 3rd circle
Vector3 middleCircle = Vector3.zero;
DubinsMath.GetRLRorLRLTangents(
startLeftCircle,
goalLeftCircle,
true,
out startTangent,
out goalTangent,
out middleCircle);
//Calculate the total length of this path
float length1 = DubinsMath.GetArcLength(startLeftCircle, startPos, startTangent, true);
float length2 = DubinsMath.GetArcLength(middleCircle, startTangent, goalTangent, false);
float length3 = DubinsMath.GetArcLength(goalLeftCircle, goalTangent, goalPos, true);
//Save the data
OneDubinsPath pathData = new OneDubinsPath(length1, length2, length3, startTangent, goalTangent, PathType.LRL);
//We also need this data to simplify when generating the final path
pathData.segment2Turning = true;
//LRL
pathData.SetIfTurningRight(false, true, false);
//Add the path to the collection of all paths
pathDataList.Add(pathData);
}
//
// Generate the final path from the tangent points
//
//When we have found the tangent points and lengths of each path we need to get the individual coordinates
//of the entire path so we can travel along the path
void GeneratePathCoordinates()
{
for (int i = 0; i < pathDataList.Count; i++)
{
GetTotalPath(pathDataList[i]);
}
}
//Find the coordinates of the entire path from the 2 tangents and length of each segment
void GetTotalPath(OneDubinsPath pathData)
{
//Store the waypoints of the final path here
List<Vector3> finalPath = new List<Vector3>();
//Start position of the car
Vector3 currentPos = startPos;
//Start heading of the car
float theta = startHeading;
//We always have to add the first position manually = the position of the car
finalPath.Add(currentPos);
//How many line segments can we fit into this part of the path
int segments = 0;
//First
segments = Mathf.FloorToInt(pathData.length1 / DubinsMath.driveDistance);
DubinsMath.AddCoordinatesToPath(
ref currentPos,
ref theta,
finalPath,
segments,
true,
pathData.segment1TurningRight);
//Second
segments = Mathf.FloorToInt(pathData.length2 / DubinsMath.driveDistance);
DubinsMath.AddCoordinatesToPath(
ref currentPos,
ref theta,
finalPath,
segments,
pathData.segment2Turning,
pathData.segment2TurningRight);
//Third
segments = Mathf.FloorToInt(pathData.length3 / DubinsMath.driveDistance);
DubinsMath.AddCoordinatesToPath(
ref currentPos,
ref theta,
finalPath,
segments,
true,
pathData.segment3TurningRight);
//Add the final goal coordinate
finalPath.Add(new Vector3(goalPos.x, currentPos.y, goalPos.z));
//Save the final path in the path data
pathData.pathCoordinates = finalPath;
}
}
}
This script will take care of all the fun math we calculated in section 2.
using UnityEngine;
using System.Collections;
using System.Collections.Generic;
namespace DubinsPathsTutorial
{
//To keep track of the different paths when debugging
public enum PathType { RSR, LSL, RSL, LSR, RLR, LRL }
//Takes care of all standardized methods related the generating of Dubins paths
public static class DubinsMath
{
//How far we are driving each update, the accuracy will improve if we lower the driveDistance
//But not too low because rounding errors will appear
//Is used to generate the coordinates of a path
public static float driveDistance = 0.02f;
//The radius the car can turn 360 degrees with
public static float turningRadius = 11f;
//Calculate center positions of the Right circle
public static Vector3 GetRightCircleCenterPos(Vector3 carPos, float heading)
{
Vector3 rightCirclePos = Vector3.zero;
//The circle is 90 degrees (pi/2 radians) to the right of the car's heading
rightCirclePos.x = carPos.x + turningRadius * Mathf.Sin(heading + (Mathf.PI / 2f));
rightCirclePos.z = carPos.z + turningRadius * Mathf.Cos(heading + (Mathf.PI / 2f));
return rightCirclePos;
}
//Calculate center positions of the Left circle
public static Vector3 GetLeftCircleCenterPos(Vector3 carPos, float heading)
{
Vector3 rightCirclePos = Vector3.zero;
//The circle is 90 degrees (pi/2 radians) to the left of the car's heading
rightCirclePos.x = carPos.x + turningRadius * Mathf.Sin(heading - (Mathf.PI / 2f));
rightCirclePos.z = carPos.z + turningRadius * Mathf.Cos(heading - (Mathf.PI / 2f));
return rightCirclePos;
}
//
// Calculate the start and end positions of the tangent lines
//
//Outer tangent (LSL and RSR)
public static void LSLorRSR(
Vector3 startCircle,
Vector3 goalCircle,
bool isBottom,
out Vector3 startTangent,
out Vector3 goalTangent)
{
//The angle to the first tangent coordinate is always 90 degrees if the both circles have the same radius
float theta = 90f * Mathf.Deg2Rad;
//Need to modify theta if the circles are not on the same height (z)
theta += Mathf.Atan2(goalCircle.z - startCircle.z, goalCircle.x - startCircle.x);
//Add pi to get the "bottom" coordinate which is on the opposite side (180 degrees = pi)
if (isBottom)
{
theta += Mathf.PI;
}
//The coordinates of the first tangent points
float xT1 = startCircle.x + turningRadius * Mathf.Cos(theta);
float zT1 = startCircle.z + turningRadius * Mathf.Sin(theta);
//To get the second coordinate we need a direction
//This direction is the same as the direction between the center pos of the circles
Vector3 dirVec = goalCircle - startCircle;
float xT2 = xT1 + dirVec.x;
float zT2 = zT1 + dirVec.z;
//The final coordinates of the tangent lines
startTangent = new Vector3(xT1, 0f, zT1);
goalTangent = new Vector3(xT2, 0f, zT2);
}
//Inner tangent (RSL and LSR)
public static void RSLorLSR(
Vector3 startCircle,
Vector3 goalCircle,
bool isBottom,
out Vector3 startTangent,
out Vector3 goalTangent)
{
//Find the distance between the circles
float D = (startCircle - goalCircle).magnitude;
//If the circles have the same radius we can use cosine and not the law of cosines
//to calculate the angle to the first tangent coordinate
float theta = Mathf.Acos((2f * turningRadius) / D);
//If the circles is LSR, then the first tangent pos is on the other side of the center line
if (isBottom)
{
theta *= -1f;
}
//Need to modify theta if the circles are not on the same height
theta += Mathf.Atan2(goalCircle.z - startCircle.z, goalCircle.x - startCircle.x);
//The coordinates of the first tangent point
float xT1 = startCircle.x + turningRadius * Mathf.Cos(theta);
float zT1 = startCircle.z + turningRadius * Mathf.Sin(theta);
//To get the second tangent coordinate we need the direction of the tangent
//To get the direction we move up 2 circle radius and end up at this coordinate
float xT1_tmp = startCircle.x + 2f * turningRadius * Mathf.Cos(theta);
float zT1_tmp = startCircle.z + 2f * turningRadius * Mathf.Sin(theta);
//The direction is between the new coordinate and the center of the target circle
Vector3 dirVec = goalCircle - new Vector3(xT1_tmp, 0f, zT1_tmp);
//The coordinates of the second tangent point is the
float xT2 = xT1 + dirVec.x;
float zT2 = zT1 + dirVec.z;
//The final coordinates of the tangent lines
startTangent = new Vector3(xT1, 0f, zT1);
goalTangent = new Vector3(xT2, 0f, zT2);
}
//Get the RLR or LRL tangent points
public static void GetRLRorLRLTangents(
Vector3 startCircle,
Vector3 goalCircle,
bool isLRL,
out Vector3 startTangent,
out Vector3 goalTangent,
out Vector3 middleCircle)
{
//The distance between the circles
float D = (startCircle - goalCircle).magnitude;
//The angle between the goal and the new 3rd circle we create with the law of cosines
float theta = Mathf.Acos(D / (4f * turningRadius));
//But we need to modify the angle theta if the circles are not on the same line
Vector3 V1 = goalCircle - startCircle;
//Different depending on if we calculate LRL or RLR
if (isLRL)
{
theta = Mathf.Atan2(V1.z, V1.x) + theta;
}
else
{
theta = Mathf.Atan2(V1.z, V1.x) - theta;
}
//Calculate the position of the third circle
float x = startCircle.x + 2f * turningRadius * Mathf.Cos(theta);
float y = startCircle.y;
float z = startCircle.z + 2f * turningRadius * Mathf.Sin(theta);
middleCircle = new Vector3(x, y, z);
//Calculate the tangent points
Vector3 V2 = (startCircle - middleCircle).normalized;
Vector3 V3 = (goalCircle - middleCircle).normalized;
startTangent = middleCircle + V2 * turningRadius;
goalTangent = middleCircle + V3 * turningRadius;
}
//Calculate the length of an circle arc depending on which direction we are driving
public static float GetArcLength(
Vector3 circleCenterPos,
Vector3 startPos,
Vector3 goalPos,
bool isLeftCircle)
{
Vector3 V1 = startPos - circleCenterPos;
Vector3 V2 = goalPos - circleCenterPos;
float theta = Mathf.Atan2(V2.z, V2.x) - Mathf.Atan2(V1.z, V1.x);
if (theta < 0f && isLeftCircle)
{
theta += 2f * Mathf.PI;
}
else if (theta > 0 && !isLeftCircle)
{
theta -= 2f * Mathf.PI;
}
float arcLength = Mathf.Abs(theta * turningRadius);
return arcLength;
}
//Loops through segments of a path and add new coordinates to the final path
public static void AddCoordinatesToPath(
ref Vector3 currentPos,
ref float theta,
List<Vector3> finalPath,
int segments,
bool isTurning,
bool isTurningRight)
{
for (int i = 0; i < segments; i++)
{
//Update the position of the car
currentPos.x += driveDistance * Mathf.Sin(theta);
currentPos.z += driveDistance * Mathf.Cos(theta);
//Don't update the heading if we are driving straight
if (isTurning)
{
//Which way are we turning?
float turnParameter = 1f;
if (!isTurningRight)
{
turnParameter = -1f;
}
//Update the heading
theta += (driveDistance / turningRadius) * turnParameter;
}
//Add the new coordinate to the path
finalPath.Add(currentPos);
}
}
}
}
This final script will hold everything we need when we have generated a Dubins path.
using UnityEngine;
using System.Collections;
using System.Collections.Generic;
namespace DubinsPathsTutorial
{
//Will hold data related to one Dubins path so we can sort them
public class OneDubinsPath
{
//Tthe total length of this path
public float totalLength;
//Need the individual path lengths for debugging and to find the final path
public float length1;
public float length2;
public float length3;
//The 2 tangent points we need to connect the lines and curves
public Vector3 tangent1;
public Vector3 tangent2;
//The type, such as RSL
public PathType pathType;
//The coordinates of the final path
public List<Vector3> pathCoordinates;
//To simplify when we generate the final path coordinates
//Are we turning or driving straight in segment 2?
public bool segment2Turning;
//Are we turning right in the particular segment?
public bool segment1TurningRight;
public bool segment2TurningRight;
public bool segment3TurningRight;
public OneDubinsPath(float length1, float length2, float length3, Vector3 tangent1, Vector3 tangent2, PathType pathType)
{
//Calculate the total length of this path
this.totalLength = length1 + length2 + length3;
this.length1 = length1;
this.length2 = length2;
this.length3 = length3;
this.tangent1 = tangent1;
this.tangent2 = tangent2;
this.pathType = pathType;
}
//Are we turning right in any of the segments?
public void SetIfTurningRight(bool segment1TurningRight, bool segment2TurningRight, bool segment3TurningRight)
{
this.segment1TurningRight = segment1TurningRight;
this.segment2TurningRight = segment2TurningRight;
this.segment3TurningRight = segment3TurningRight;
}
}
}
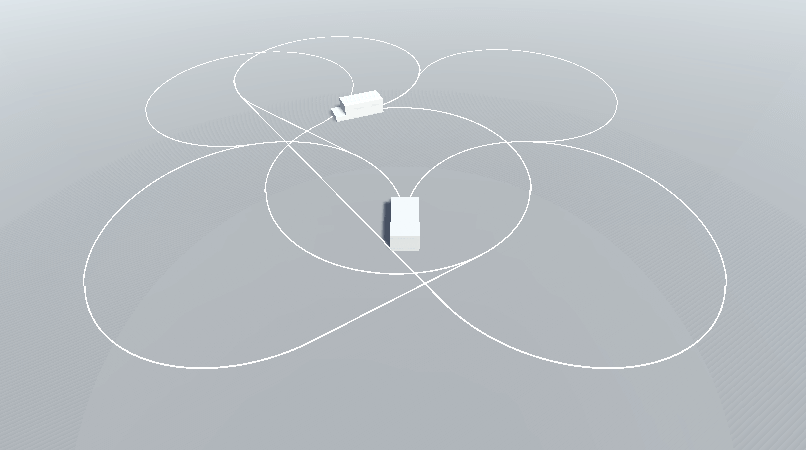
...and if you now press play (and attach a cool camera script to the scene) you should see something like this: